High fidelity physics with hardware and software in the loop
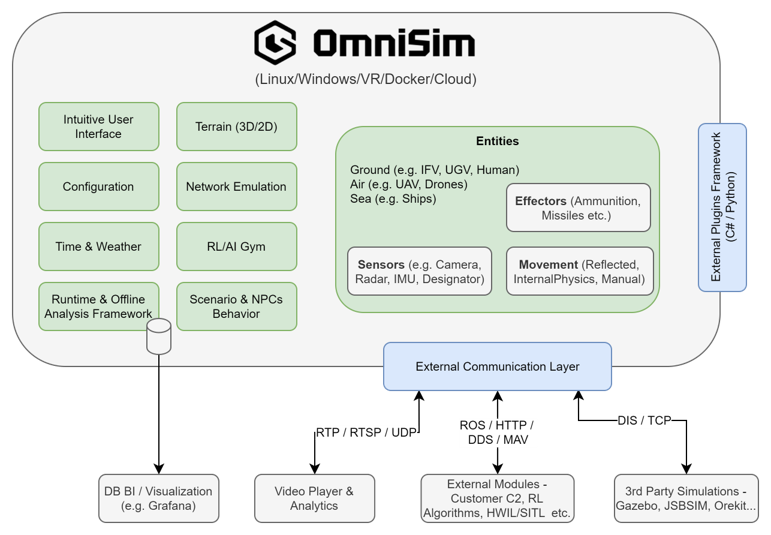
Simulate drones, ground vehicles and UAVs with realistic physics and validate real time performance using HWIL/SITL setups.
Omnisim supports high fidelity, physics based simulation for a wide range of platforms, including drones, ground vehicles and UAVs. You can connect real hardware or embedded software using hardware in the loop and software in the loop configurations to test timing, control and integration in a controlled environment. This allows you to validate algorithms and system performance early, reduce risk and shorten the path from lab to field.
Get a Demo